点云数据
点云数据
什么是点云数据
点云是点的集合,相较于传统二维图像,点云提供了深度信息,即点云直接提供了三维空间的数据,每一点具有坐标$x,y,z$。
点云数据获取
激光雷达$(LiDAR)$、立体视觉
点云数据特性
PointNet
基本出发点
由于点云的无序性,端到端$(end-to-end)$模型需要具有置换不变性
即将原始特征$MLP$升维后取最大值作为输出特征,再通过$MLP$进行分类。
没有考虑局部特征融合
PintNet++
基于半径选择局部区域,对区域进行卷积特征提取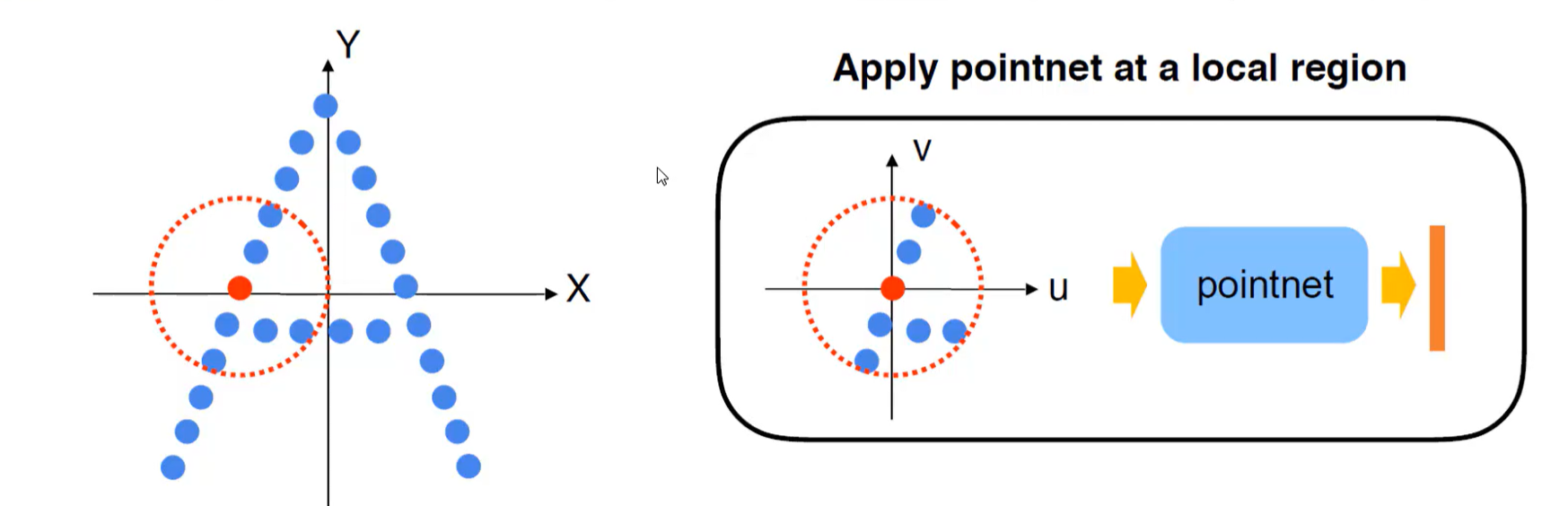
最远点采样
分组
由于卷积操作需求,需要固定每个簇内点的数量(少则复制最近,多则删除最远)
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Guchen's Blog!
评论